Previously we looked at how the logistic map is affected by changing the parameter r for small values. Now we’re going to look at what happens when we change it the parameter r for large values, say  . Instead of converging to a fixed point, the orbit oscillates. For the logistic map, these orbits exist between
. Instead of converging to a fixed point, the orbit oscillates. For the logistic map, these orbits exist between  and
and  and the oscillations repeat every two iterations as shown below:
and the oscillations repeat every two iterations as shown below:

Period-2 orbits
This is also known as a period-2 orbit. Again, for larger values of r, say  , the orbit now repeats its oscillations every four iterations.
, the orbit now repeats its oscillations every four iterations.
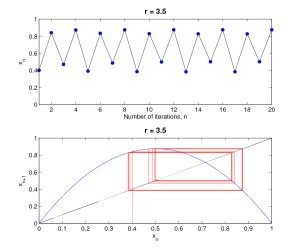
Period-4 orbits
In other words, the previous orbit has doubled its period to a period-4 orbit. The splitting of the orbit is known as a bifurcation, i.e. at the orbit bifurcates into two solutions, and for the orbit bifurcates into four solutions. As we increase r even further, more bifurcations occur resulting in orbits of period  . The table below shows values of r for which these bifurcations occur [1].
. The table below shows values of r for which these bifurcations occur [1].

We can graph this data to get the bifurcation diagram for the logistic map, showing the possible long-term behaviour for all values of r between 0 and 4. Note, you can click on the image to see a larger version of the image.

Bifurcation for r between 0 and 4
To clarify and understand the points of bifurcations; we can also graph the bifurcation at a smaller interval for r.

Zoomed in of the above bifurcation. Values of r between r=2.8 and r=4.0
Clearly from both the table and graphs we can observe that the bifurcations occur faster and faster until 
 . Here the map becomes chaotic and has infinite number of periodic orbits. Therefore, an infinite set of points or solutions. In other words, the map doesn’t converge to a fixed point or periodic orbit, instead it becomes aperiodic. This is an example into the periodic-doubling route to chaos. We can plot histograms with reference to the bifurcation diagrams. The histograms display the amount of time a typical orbit spends in some part of the attractor, for different values of r we have different attractors. Here we’ll use
. Here the map becomes chaotic and has infinite number of periodic orbits. Therefore, an infinite set of points or solutions. In other words, the map doesn’t converge to a fixed point or periodic orbit, instead it becomes aperiodic. This is an example into the periodic-doubling route to chaos. We can plot histograms with reference to the bifurcation diagrams. The histograms display the amount of time a typical orbit spends in some part of the attractor, for different values of r we have different attractors. Here we’ll use  and
and  , with initial condition 0.4 and 10000 x values. From the bifurcation diagrams we expect that the distribution of data eventually spreads across the whole range of x values (0 to 1) as we increase the parameter r.
, with initial condition 0.4 and 10000 x values. From the bifurcation diagrams we expect that the distribution of data eventually spreads across the whole range of x values (0 to 1) as we increase the parameter r.

Logistic map histograms: Distribution of data
For  , the data lies on two values which supports the fact that for the orbit is period-2, and so the orbit oscillates between two values. Similarly for , the orbit is period-4 and the data lies on four values. As we approach
, the data lies on two values which supports the fact that for the orbit is period-2, and so the orbit oscillates between two values. Similarly for , the orbit is period-4 and the data lies on four values. As we approach  we begin to see the data converging to a U-shaped distribution, with the number of values intensifying at zero and one.
we begin to see the data converging to a U-shaped distribution, with the number of values intensifying at zero and one.
Sources:
[1] STROGATZ, S.H. (1994). Nonlinear dynamics and chaos. New York, USA. Westview Press, Perseus.
(I suggest you check this book out, it’s amazing and helped me a lot through my university years)!
P.S. All images generated on MATLAB, if you want my M-files then feel free to contact me!




















 .
. . As we can see in the figure below, for
. As we can see in the figure below, for  the orbit tends to 0, independent of the initial condition. However, when
the orbit tends to 0, independent of the initial condition. However, when  the orbit will quickly converge towards a fixed point. For clarity we will connect the discrete points by line segments, note, only the blue points are significant, using initial condition
the orbit will quickly converge towards a fixed point. For clarity we will connect the discrete points by line segments, note, only the blue points are significant, using initial condition  throughout. The population is decreasing and will eventually approach 0 as the number of iterations tends to infinity for
throughout. The population is decreasing and will eventually approach 0 as the number of iterations tends to infinity for  the map tends to 0. For
the map tends to 0. For  we can show mathematically that the population approaches a fixed point
we can show mathematically that the population approaches a fixed point  .
.
 . Expanding gives
. Expanding gives  , we then divide through by
, we then divide through by  to get
to get  and finally rearrange to get fixed point at
and finally rearrange to get fixed point at  . For example, at
. For example, at  the fixed point is at
the fixed point is at  . These results can be supported by plotting the corresponding cobweb plots (also seen below).
. These results can be supported by plotting the corresponding cobweb plots (also seen below).

 and
and  with minute differences the orbits diverge quickly from one another. Starting with a small difference of approximately 0.01 after 10 iterations. However, after 20 iterations, the difference is in its billions.
with minute differences the orbits diverge quickly from one another. Starting with a small difference of approximately 0.01 after 10 iterations. However, after 20 iterations, the difference is in its billions. 

 ). The two systems we will be looking at (as previously stated) are the logistic map and the tent map, these maps illustrate how chaotic behaviour arises from simple systems.
). The two systems we will be looking at (as previously stated) are the logistic map and the tent map, these maps illustrate how chaotic behaviour arises from simple systems.
 represents the ratio of the existing populations to a possible maximum population at year n such that
represents the ratio of the existing populations to a possible maximum population at year n such that  . For example,
. For example,  represents the initial ratio at year 0. The parameter r is a positive number, representing the rate of reproduction and starvation such that
represents the initial ratio at year 0. The parameter r is a positive number, representing the rate of reproduction and starvation such that  .
.
 as shown above. Increasing the value of r=0 to r=4 make the map undergo a series of period-doubling bifurcations, something we will be exploring later on. The logistic map has fixed points at x=0 and x=1, regardless of r. However, the stability of the fixed points depend upon r. Again, something we will be exploring in the future.
as shown above. Increasing the value of r=0 to r=4 make the map undergo a series of period-doubling bifurcations, something we will be exploring later on. The logistic map has fixed points at x=0 and x=1, regardless of r. However, the stability of the fixed points depend upon r. Again, something we will be exploring in the future.